车联网平台的发展已经经历了三个主要阶段,即从最开始的TSP平台阶段(连接服务),到智能网联平台阶段(整车智能),再到现在自动驾驶云控平台阶段(车路协同),下一阶段将会基于“大数据+深度学习”技术从特定场景的自动驾驶到更广泛领域的智能化出行服务,实现全面的车-路-云高效协同。
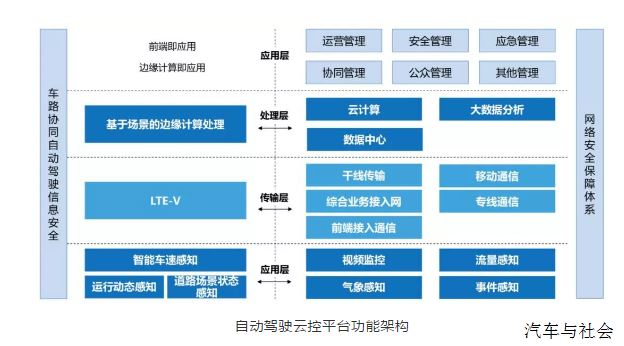
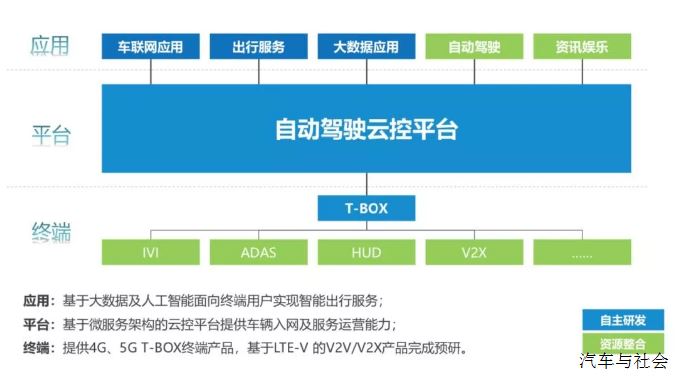
斯润自动驾驶云控平台(Sirius Cloud Control以下简称云控平台)按功能分为感知层、传输层、处理层(近场处理、云端处理)、应用层共四层。
感知层通过车载设备或近端感知设备的信息获取来实现对车辆或环境状态数据的上报,通过智能终端进行数据的传输。
传输层则需要保证数据在传递过程中的实时性,车端通过CAN、LIN、FlexRay总线或以太网技术进行高速数据传输,传输通道通过5G或WIFI、NB-IOT等等过渡网络连接方式实现,在保证数据传递的低时延的前提下,完成整个控制链路的可靠性,安全性。
处理层包括近场处理以及云端处理两个过程,路端靠近车辆的设备中,通过边缘计算等技术可以实现近场处理,远远降低了数据传输的链路长度,提高了时效性,保障了低时延的需求。而云端处理则是通过将大量的数据上报之后进行综合分析,处理的数据具有高安全性的同时能够为应用层提供服务。
应用层包括运营管理、安全管理、应急管理、协同管理、公众管理等多方面应用,可以根据平台应用的环境进行设计,也可以通过丰富的人机交互设计实现客户的多重服务需求,最终将使“人-车-路-云”实现高效协同。
自动驾驶云控平台功能中,每一个层级都有特定的功能,解决特定的问题,其中的关键技术是在发展的过程中不断的更新、迭代,而不是一夜之间就出现的。
平台架构与关键技术
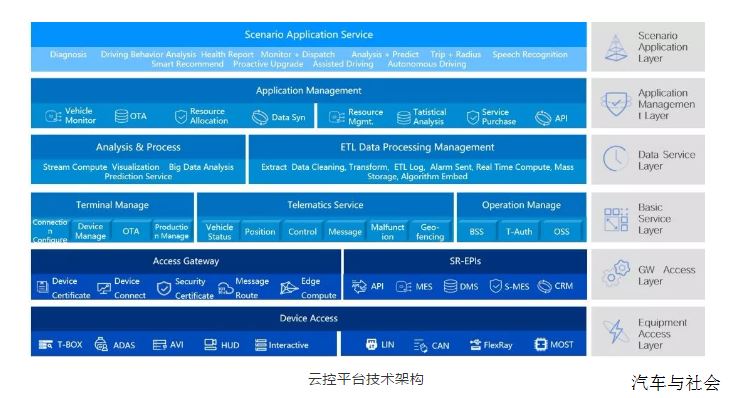
自动驾驶云控平台脱离不了开放的车联网平台的技术,我们就从最底层到应用层开始进行逐级的分解,就云控平台架构技术而言,需要对每个功能层都进行定义及封装,通过对信息的采集、信息的分类处理、信息的计算再到应用过程来实现车辆的控制,或反之通过应用层对以下层面至终端进行控制。
底层是设备的接入层,随着汽车设备电子化进度的加快,可接入汽车的电子设备逐渐增多,如AVI、HUD、ADAS、T-BOX等等,那么如何能够有效的管理以及接入设备成了关键,接入的手段也有一些差异,除了像常规的CAN总线,未来还有以太网、Flexray、MOST等其他方式的接入手段来完成平台的数据采集要求。
网关层是对多协议的适配及多终端的融合的支持,斯润过去与国际、国内的95%的TBOX、IVI设备供应商建立的对接适配与联合交付工作,现在云控平台的网关进行平滑的扩展,将多路ADAS、路测试单元进行完整的融合,任何传感器与云端进行数据传递都需要建立非常高效且稳定的链接,所以我们需要在接入层设计出一套能够将多种设备进行有效接入的网关,我们称之为智能网关。
智能网关可以帮助终端设备与边缘计算、云端建立有效的连接,其中涵盖协议适配、消息路由、消息解析、消息转发,同时需要添加网关安全策略,例如Security Authentication。
另外一个部分叫EPIS,这是系统级的网关接口,这部分的功能主要是为了与车厂、示范园区数据中心、系统级的对接,保证系统的信息可以互相传递,完成整个数据链路的互动,打通上下游整体的信息通道。如与示范园区数据中心、汽车厂家各IT系统之间的连接,从而形成从汽车生产下线到车辆上路验收等整个汽车生命周期过程管理与更新记录。
网关的上层是智能网联的核心部分,我们称为基础服务层,其中涵盖了终端管理、车联网服务以及运营服务三个部分,由于终端的多样性,实际上很难对多个终端进行统一的协调和控制;每一家供应商提供的设备控制方式不一,所以控制策略就会有差异,比如T-BOX失联,问题会涉及到跟云端的通信,从而影响车辆数据的上报、以及对车辆的控制,那么此时怎么识别问题的原因,通过数据的分析如何对问题进行快速的定位是我们要考虑的核心问题。
数据层的主要任务是将数据进行清洗、存贮、隔离的动作。实际上自动驾驶,数据来源于平台、终端的数据内容,数据量特别的庞大,所以需要对数据的存储策略进行设计。
最上层是平台的应用部分,分为两个单元,第一部分是应用网关,应用如果想调用云控平台的组件,需要进行鉴权,具有安全认证策略,并不是所有的场景应用都能够访问平台,应用网关会围绕上层应用、三方的资源及算法进行判断与识别,将从单车应用扩展到多车应用。
百度阿波罗自动驾驶技术是一整套算法,是在特定的区域内通过传统的车载设备完成数据采集,再通过算法来决策车辆行驶的路径的一系列过程,我们称之为单车智能。
如果自动驾驶要做规模化的商用,就需要使用完整的平台功能来连接每一辆车,并且提供对车辆的控制及应用、管理的能力以及根据车辆的状态实时提供管理及控制策略,因此在自动驾驶云控平台中所应用的技术路线要随之发生变化,接下来我们对智能网关、大数据存储及数据的可视化部分分别进行展开。
智能网关:
主机厂内容有很多自定义的协议,不同的车型具有不同的协议接入,这些都是对整体网关适配的能力的考验。所以网关的适配是核心能力。云控平台可以和企业平台进行对接,基于自动驾驶可以延伸出不同的三方平台,多平台的接入能力,是保证适用性的重要能力。智能网关Access Gateway大的框架基于MQTT、CoAP、TCP、HTTP、GB以及NB-IOT标准,能够将设备的接入变得简单,并且能够进行数据的分发及交互。
应用上层包含外部、内部服务,如AVP服务与云控平台的对接,还有AEB或其他服务,而且未来也会基于自动驾驶产生多种多样的服务,都可以与云控平台进行对接,因此智能网关需要具备多平台、多协议的技术接入能力,同时,在内部服务中要贯通终端管理、数据分析、面向2B端客户从应用到业务端的支撑单元进行贯通,业务逻辑打通,使得在运营环节没有数据的延迟。

大数据存储:
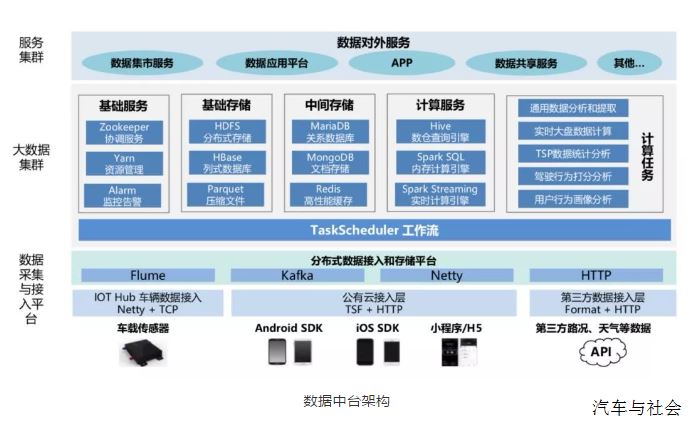
自动驾驶场景下采集的数据量会变得非常庞大,单台车的数据量每天可以达到4-8T。那么面对这样庞大的数据量,我们就需要通过对“数据流”进行管理,来达到提升数据存储速度及存储效率。HDMS是分布式的数据存储方式,根据数据结构,不会去管控数据查询的效率,主要的用途是将数据进行快速存储在本地和云端的服务器。
其中的重点是把数据的采集、数据的接入做管理,如传感器、应用SDK以及第三方资源的接入等。接入方式不同所对应的传输的方式也有不同,从KAFKA到HTTP以及带有安全策略的TOS,目的都是基于数据的分布式存储,将基础存储、中间层存储,计算服务性内容等构建大数据集群,所以我们在数据存储的环节,需要构建大数据中台,把数据的存储方式和存储策略建立起来,大数据的概念大家基本上都有些共识,这里就不做过多的赘述了。
数据可视化:
技术可验证与实际交付
车路协同系统:在示范园区车路协同系统的构建包括路侧智能化基础设施、通讯网络、自动驾驶云控平台以及车辆(终端)四个部分。路侧智能化基础设施需要部署网联式交通信号灯、毫米波雷达、激光雷达、智能摄像头、V2X路侧通信终端、边缘服务器、电子信息指示牌等基础设备,又称为智能化前端系统。
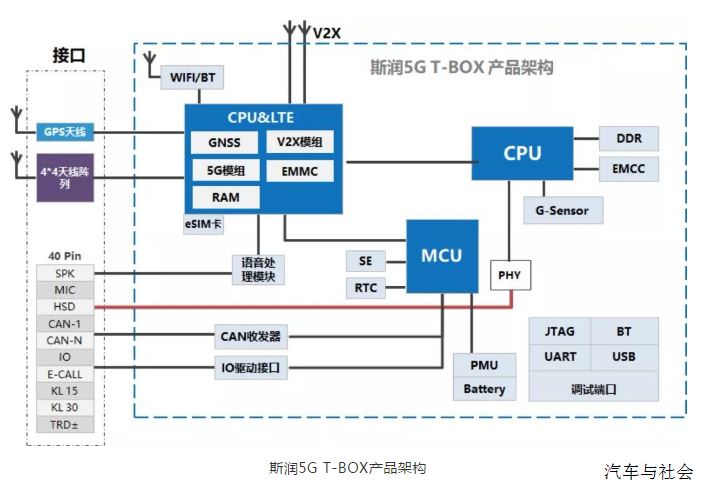
T-BOX终端:目前斯润已经与中移动成立了联合实验室,与华为、和高通的通讯模组进行集成合作。在自动驾驶环节中,T-BOX是车上唯一的联网部件,其能力会向更高级的域控制器进行迭代,通讯模组功能和运算能力会相应的进行扩展与升级,传统的T-BOX内部主要包含CPU、MCU以及通讯模组组成,核心能力主要体现在基于Linux系统下的软件架构OS处理能力上。
自动驾驶可以应用为虚拟仿真的展现方式,更多时候我们考虑基于数据展示的方式来进行利用,斯润基于自主研发以及第三方的开源技术能力来提供数据可视化服务。
开源的数据可视化产品如百度ECharts、阿里Data V,腾讯RayData华为的DLV,微软的Power Bi、Qlik等,都可以在特定的条件下提供进行数据展示的服务。目的是围绕云控平台在特定的环境下去做可视化的呈现,显示特定的数据,可以通过数据化的展现方式来对车辆进行管理,以及对应用服务进行数据的呈现并提供业务支撑。

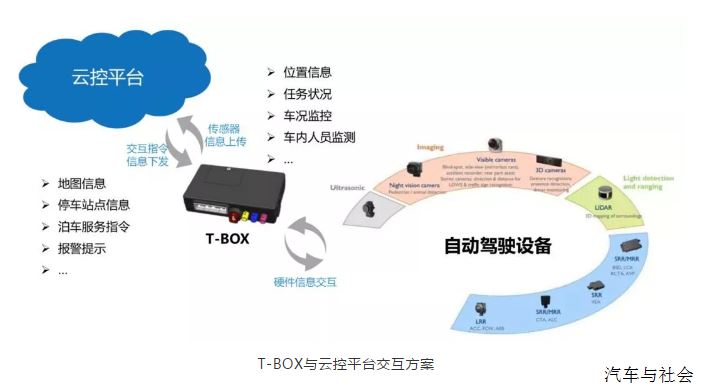
在整个自动驾驶环节从硬件到平台到上层的应用分为三个部分,斯润的核心能力体现在T-BOX终端、自动驾驶云控平台以及应用层的车联网应用、出行服务和大数据服务方面。其他的内容我们会结合第三方的服务以及硬件来整合所有的资源,提供自动驾驶服务。
T-BOX会将摄像头、雷达等设备的情况上传到云控平台,同时也可以将车内的传感器将车内人员的情况进行上传到云控平台。云控平台通过对T-BOX上传的数据以及其他平台的数据进行综合分析,下发指令至T-BOX而后通过车辆的网关对数据进行分发,从而完成数据传递的整个过程。
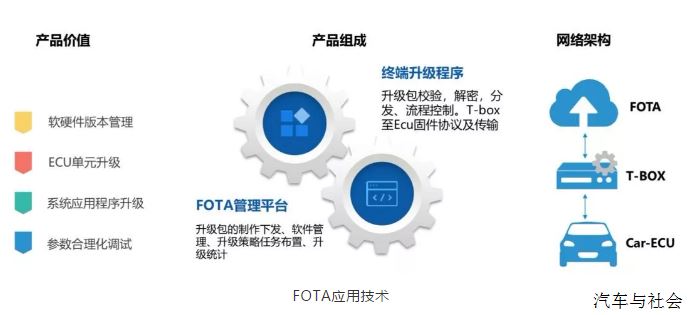
FOTA远程升级:在自动驾驶环境中,终端的程序面临各种紧急情况的挑战,对比车联网平台中,只需要对T-BOX以及车机或者液晶仪表等部件进行远程升级,但到了自动驾驶环境下,车辆的终端设备开始增加,应用场景也变得更加复杂,这时候所面临到的管理能力和软件迭代压力将大大增加,面对如此复杂的应用场景,各设备应用的复杂程度是我们之前难以想象的,所以,我们的解决方案是通过终端管理平台应用,以及有效的终端分析、管理能力来提供升级策略,协助整个自动驾驶场景下的所有终端产品进行远程迭代。
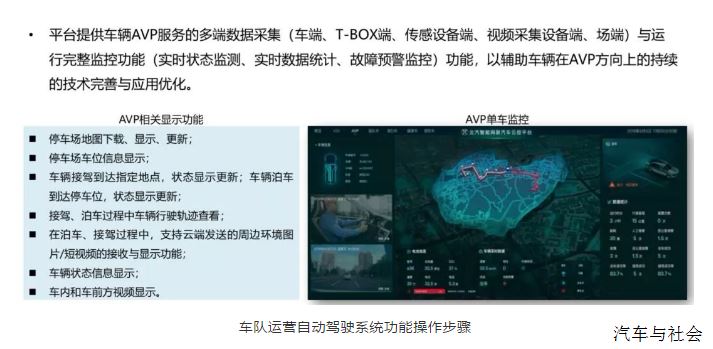
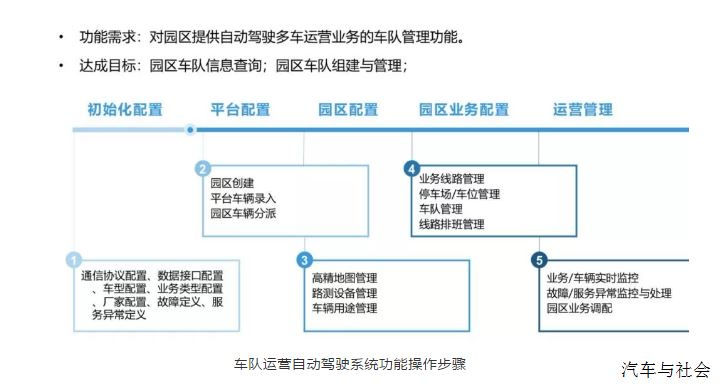
车队运营中的车联网技术
在示范园区的环境中,路侧智能化基础设施、通讯网络、车联网云控平台以及T-BOX的模组都已经完成适配的情况下,车辆已经具备了使用自动驾驶的功能。我们便可以通过车队运营自动驾驶系统来为车队的运营提供自动驾驶多车运营的服务,在这种环境下,第一辆车可以是有人驾驶车辆,后面的车队采用自动驾驶,也可以是完全自动驾驶。
车队运营自动驾驶系统分为初始化配置、平台配置、园区配置、业务配置、运营管理五个环节。系统可以实现路线规划、车辆添加、车队组建、计划安排、实时监控、故障报警、设备管理、任务分配等功能。
园区自动驾驶场景的应用
AVP(Automated Valet Parking)即自动代客泊车服务,对比配置了RSPA功能的车辆,利用超声波传感器,车外的驾驶员只需按下按钮,就可以实现自动泊车,但前提条件是得提供一个空置的停车位,而AVP技术可以使车辆自行寻找空置的停车位并自动驶向该车位完成泊车操作,全程无需人为干预,应用前景广阔。